Concordo con Riccardo che senza conoscere meglio la situazione per noi e’ un po’ sparare a caso … ![]()
Ci sono altri sensori sulla trave o quello e’ l’unico ?
EDIT:
Come non detto, non avevo visto la tua risposta …
Concordo con Riccardo che senza conoscere meglio la situazione per noi e’ un po’ sparare a caso … ![]()
Ci sono altri sensori sulla trave o quello e’ l’unico ?
EDIT:
Come non detto, non avevo visto la tua risposta …
Mi è sfuggito il termine, non farci caso, sarebbe complesso e controproducente spiegarne il motivo dell’utilizzo. Credo sia meglio concentrarci sull’ultimo esempio che ho fatto, più affine ad una modellazione con Grasshopper.
Avendo più punti inizia ad essere più un problema approcciabile…
Dei punti C, D e E sono noti angolo e posizione X, ed è da calcolare la coordinata Z.
(Y si può considerare 0 in tutto il problema, quindi ignorabile)
E il momento d’inerzia della trave è costante.
… fin qua confermi?
Ho bisogno di un chiarimento: i punti A e B , le estremità, sono “cerniere” o solo vincoli di posizione in Z? (e quindi la trave sarebbe libera di scorrere in A e B, ma deve passare per A e B…)
Edit:
A e B sono “cerniera fissa” o “carrello scorrevole”?
Riguardo alla prima parte, confermo, tutto corretto.
Riguardo ai vincoli fissi A e B, sono cerniere, permettono la rotazione dell’asta attorno all’asse Y ma non permettono spostamenti né verticali (direzione Z) né orizzontali (direzione X).
Come prima approssimazione … una polilinea ?
Segmenti col punto medio sui sensori e la giusta inclinazione, concatenati ?
Mah, non sono per niente persuaso…
… il tempo di rilassamento sembra molto lungo, e anche a simulazione inoltrata la trave inizia a trovare nuovi equilibri…
… e non ho modo di verificare empiricamente la bontà del risultato.
Ergo, affidabilità molto bassa.
Non so nemmeno perché l’ho postato qua.
Sta roba è molto elastica. Non abbiamo moduli di Young paragonabili ai metalli certamente.
Se deve comportarsi in modo simmetrico non lo trovo difficile, ma se deve deformarsi come potrebbe deformarsi un materiale vero occorrono le proprietà del materiale.
Inoltre non siamo nel campo dei piccoli spostamenti, il ché rende la cosa più difficile.
Perché parlavi di energia di deformazione? Come pensavi di usarla? Per calcolarla ti serve la curva sigma epsilon.
Siamo partiti da qui. Quale è il materiale e il modulo di Young innanzitutto?l
Come imponi la rotazione? Rispetto a quale asse? Come fai a sapere il centro di rotazione della sezione della trave? Io continuo a sostenere che si debba approcciare il problema con l equazioni della linea elastica applicando i carichi, poi con Galapagos, se vuoi un automatismo, far trovare a lui il carico (che genera M2) che produce una certa deformazione.
Del resto se hai solo il carico verticale hai solo M2. Serve il momento di inerzia del secondo ordine e il modulo di Young.
Ti ringrazio per aver provato a ricavare una soluzione. Può sicuramente essere uno script interessante, nonostante i problemi potrei comunque studiarmelo per imparare qualcosa in più su Grasshopper.
Le proprietà del materiale (modulo elastico) e geometriche (momento di inerzia), sono delle costanti nel calcolo della deformata di uno schema statico isostatico, lo si vede integrando una qualsiasi linea elastica. Puoi quindi usare i valori che preferisci ottenendo un risultato normalizzato.
L’energia di deformazione non devo usarla, implementando una asta perfettamente elastica in un solver che ne gestisce le proprietà (es. Kangaroo) sarà il software a trovare le configurazioni dell’asta che minimizzano l’energia elastica della stessa a seguito di una deformazione.
Il grafico sigma epsilon servirebbe per una trave reale, ma non nel caso in cui io imponessi di rimanere in campo puramente elastico in cui questo risulterebbe una retta passante per l’origine con modulo elastico pari alla pendenza (legge di Hooke). (Ricordo poi che il modulo può essere scelto a piacimento normalizzando la soluzione essendo una costante nel calcolo delle deformazioni di una trave isostatica).
La rotazione la impongo rispetto all’asse baricentrico della i-esima sezione, attorno all’asse Y, il centro di rotazione della sezione non è importante.
I carichi come detto non ce li ho, ho le rotazioni di alcune sezioni lungo la trave.
Detto ciò, ho proposto una nuova strada, per i miei scopi equivalente, che credo sia più agevole da concepire e realizzare, che esula da aspetti tecnici in cui, chi non è della materia potrebbe impelagarsi.
Puoi darci un esempio di dati iniziali?
A che percentuale della lunghezza c’è quale angolo?
Uno “spago” fissato teso tra due punti, se applicata una forza a metà dello spago, creerebbe una forza di tensione interna allo spago virtualmente infinita (/cos(0)).
In realtà, lo spago è sempre un poco elastico e allungangosi permette di creare un angolo utile (/cos(>0))…
La tua trave è appoggiata su due cerniere, ok … ma se hai angoli superiori al… mezzo grado(?), mi viene da pensare che le due cerniere si sono comunque un poco avvicinate, altrimenti si creerebbe una tensione interna alla trave, una trazione lungo l’asse, enorme.
Forse mi sono spiegato male, ma se ci fossero più dati realistici si riuscirebbe a immaginare meglio la situazione.
Ora come ora mi immagino una trave che appena gli applico il tuo dato iniziale, l’angolo, deve assumere una tensione di trazione interna immensa… la flessione è una bazzecola in confronto.
Penso di star trovando una soluzione, con un aiuto esperto, non lo nego.
In ogni caso aspetto a cantar vittoria e intanto ti rispondo. In scienza delle costruzioni, più precisamente nella teoria elastica delle travi, si assume un’ipotesi di base, detta ipotesi di piccoli spostamenti assunto per il quale l’angolo di rotazione, espresso in radianti, della sezione di una trave nella configurazione deformata è confondibile con la tangente di tale angolo e di conseguenza con la derivata prima della funzione spostamento, calcolata nel punto corrispondente dell’asse della trave. questo lo si fa perché altrimenti nascerebbero effetti secondari, tra qui quelli che hai detto, in aggiunta ad effetti P-delta, ovvero momenti secondari ed è giustificato dal fatto che in ingegneria civile le deformazioni in campo elastico sono generalmente quasi impercettibili. Tale semplificazione è alla base della teoria elastica della trave e su questa si regge ad esempio la scrittura della linea elastica.
Beh, ora che l’hai trovato, dicci come avete fatto XD
Di sicuro siamo tutti interessati a riguardo.
ok… capisco il discorso…
Quindi immagino anche che tu stia parlando di angoli molto piccoli… per quello chiedevo i valori, mi stavo immaginando un trampolino da piscina… sicuramente sbagliato. ![]()
Prima vorrei capirci qualcosa, visto che mi è stato inviato lo script e spiegato ben poco.
Certo, come dicevo siamo in campo elastico, e nella teoria elastica delle travi è una condizione necessaria.
Ti chiedo scusa se non era chiaro ma parlando di aspetti tecnici è difficile essere chiari fin da subito su tutto.
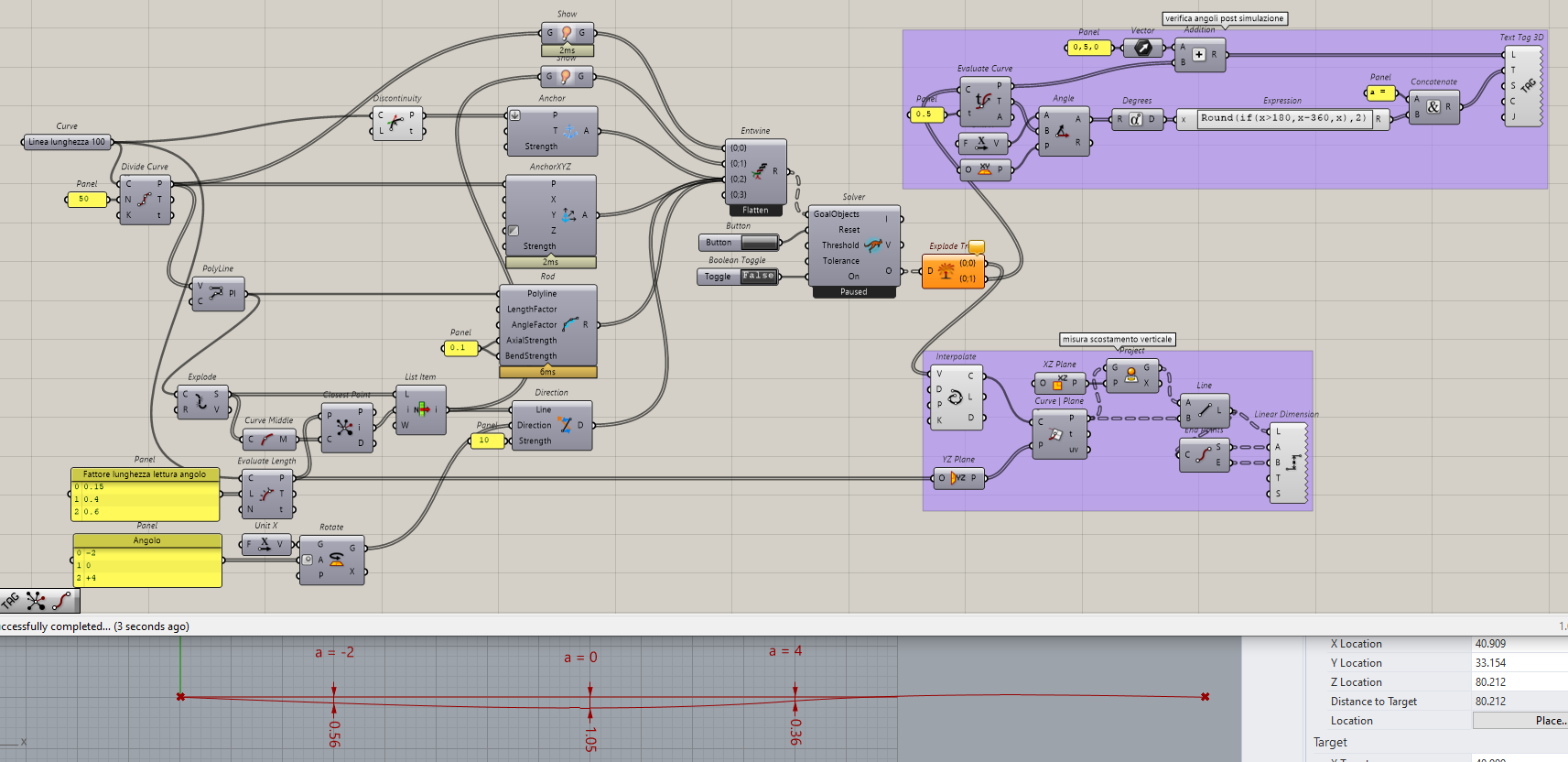
Come richiesto, vi posto lo script che da poco mi sono messo a studiare e cercare di raggruppare per semplificarne la lettura e cercare di capirne il senso.
L’idea è stata quella di interpolate tre punti con una curva di grado variabile (generalmente le linee elastiche sono curve di massimo quarto grado), due di questi fissi (vincoli esterni) ed uno variabile parametrizzato attraverso l’ascissa e la quota. Viene poi ricavata la tangente e la normale a tale curva nel punto considerato. A questo punto, fissata la lunghezza della trave, l’ascissa del punto considerato, il grado della curva interpolante ed impostato un valore dell’angolo richiesto nella sezione corrispondente (panel giallo all’interno del gruppo algoritmo) si può far corre galapagos che con un certo scarto (indicato nel panel rosso) ricaverà la quita del punto per far si che possa essere interpolato assieme agli altri due punti fissi con una curva del grado scelto.
Quello che vorrei provare a fare ora è aumentare i punti da interpolare aggiungendo un secondo punto variabile e vedere se fissando l’ascissa per entrambi i punti, e dando in pasto due angoli a galapagos, questo mi fornisce due quote.
Deformazione_Trave appoggiata.gh (31,9 KB)
Avevo scritto fin dall’inizio che occorre la linea elastica. Scrivi le equazioni e con galapagos imponi come ingressi M, fissati I ed E e lui e come obiettivo dai l angolo di deformazione e la distanza. Anche se probabilmente c’è la relazione inversa e con un po di matematica non si scomoda nemmeno Galapagos.
Anzi con la linea elastica è realistico per piccole deformazioni, al limite ne modifichi la scala1D per aumentarne gli effetti.
L hai tirata in ballo e ti chiedevo perché.
Il centro/asse di rotazione della sezione lo hai appena definito, ovvero l asse baricentrico di sezione. ![]()
Se l input è un angolo, parlavi di deformazione imposta, come gliela vuoi indicare sta deformazione?
Nella statica e cinematica delle travi, asse di rotazione (riferito alla sezione) e centro di rotazione (riferito al sistema) sono due cose ben distinte.
Una sezione può ruotare attorno al proprio asse baricentrico mentre, nel piano XZ la proiezione di quest’ultimo ruota attorno al centro di rotazione.
So bene di cosa parlo. La sezione ha tre assi baricentrici (se consideriamo uno spessore infinitesimo) , e se parliamo di quello parallelo a y, posto che la trave è soggetta a forze sui piani baricentrici, l asse di rotazione coincide con quello di rotazione della sezione che del resto è l’unico responsabile della flessione di cui si parlava, My.
Ho letto qualcosa anche io di statica.
La cinematica della trave mi è nuovissima ![]()